* add ADXL345 Chain Anchor mod * Spelling * fix insert amount * remove spaces from filenames fix some markdown warnings * didnt actually test it on 1.8 and SW * Adding the change requests from @KiloQubit * Rotated stl to a printable orientation * Readme file formatted * typo in Markdown file Co-authored-by: Padok <padok@disroot.org> Co-authored-by: louis.frank <lfrank@dpz.eu> |
||
|---|---|---|
| .. | ||
| cad | ||
| img | ||
| stl | ||
| README.md | ||
README.md
Chain Anchor - ADXL345 mount Mod
Recently I started exploring the input shaper feature of klipper. Unfortunately I had to realize that it is not so easy to attach the ADXL345 in such a way that useful measurements can be collected. Therefore, I have created this mod, some drawings are of course still WIP but I think I have reached a stage where it is useful to get feedback.
Construction
I downloaded the CAD files of the Afterburner hotend and searched for a suitable place to put the ADXL345 adapter board. I found the Chain Anchor on the backside, which offered exactly the right amount of space for my purpose.

I printed the part on my printer using eSUN ABS+ Black/PeekGreen like all the other parts, but this one was unfortunately a little bit overextruded. After adding the threaded inserts, I sanded the plateau with some P180 sandpaper that I placed on a flat surface to ensure the best possible contact surface for the adapter board.

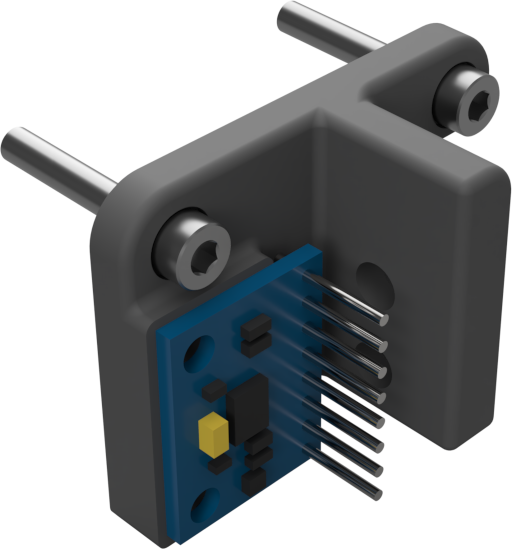
After adding the ADXL345 it should look something like this:


After that you can use this part as a replacement for the standard chain anchor.

BOM
| # | Part |
|---|---|
| / | Afterburner: Chain-Anchor Parts |
| 4 | M3 standard Voron Threaded-Insert |
| 2 | M3x6 Screw |
| 1 | ADXL345 - Triple Axis Accelerometer Breakout board |
Klipper config
#####################################################################
# G Sensor definition
#####################################################################
[adxl345]
cs_pin: PIN_CS
spi_software_sclk_pin: PIN_SCLK
spi_software_mosi_pin: PIN_MOSI
spi_software_miso_pin: PIN_MISO
axes_map: x,z,-y
Example data

